
Hi! I’m Zhen Tan (谭臻). I am currently a Ph.D. candidate at the National University of Defense Technology (NUDT), supervised by Prof. Dewen Hu (CAS Academician) and Assoc. Prof. Xieyuanli Chen. Prior to this, I obtained my Master’s degree from the Technical University of Munich (TUM), guided by Prof. Yusheng Xu, and my Bachelor’s degree from Wuhan University (WHU).
My research vision aims to bridge the gap between High-Fidelity 3D Vision (NeRF/3DGS) and Embodied Intelligence. I focus on building robust Spatial Representations and World Models that enable robots to understand and interact with dynamic environments.
I value the intersection of academic research and industrial deployment.
- Engineering Foundation: Before my PhD, I worked as a Sensor Fusion Engineer at LiangDao Intelligence, leading the development of LiDAR-Camera fusion systems for highway autonomous driving.
- Research Collaboration: Recently, I have maintained close research collaborations with teams at 4DV.ai and CVLife. Together, we explored Monocular 4D Gaussian Splatting on mobile devices and optimized Fast differentiable rendering, pushing the boundaries of efficient spatial perception.
🔥 News
- 2025.12: 🎉🎉 One Paper is accepted to RA-L 2025!
- 2025.10: 🏆🏆 We won the Champion of the IROS 2025 EvSLAM Challenge!
- 2025.06: 🎉🎉 One Paper is accepted to IROS 2025!
- 2025.01: 🎉🎉 One Paper is accepted to ICRA 2025!
- 2024.06: 🎉🎉 One Paper is accepted to IROS 2024!
📝 Publications
* denotes equal contribution.
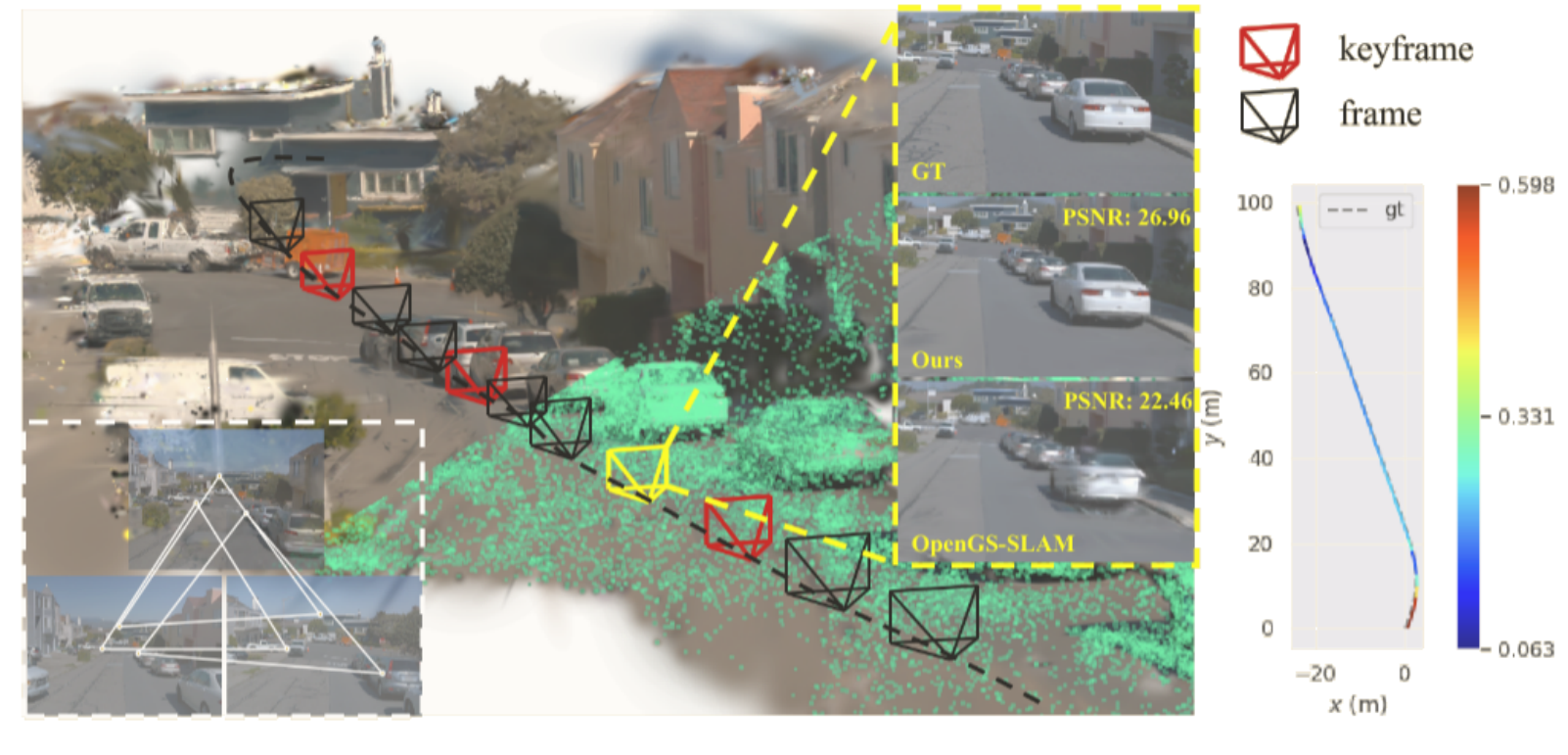
TVG-SLAM: Robust Gaussian Splatting SLAM with Tri-view Geometric Constraints
Zhen Tan, Xieyuanli Chen, L. Feng, Y. Ge, S. Zhi, J. Liu, Dewen Hu
- Proposed a tri-view geometric constraint to address the instability of 3D Gaussian Splatting in texture-less or repetitive regions.
- Achieved tightly-coupled optimization of camera tracking and high-fidelity mapping, ensuring robustness in challenging outdoor environments.
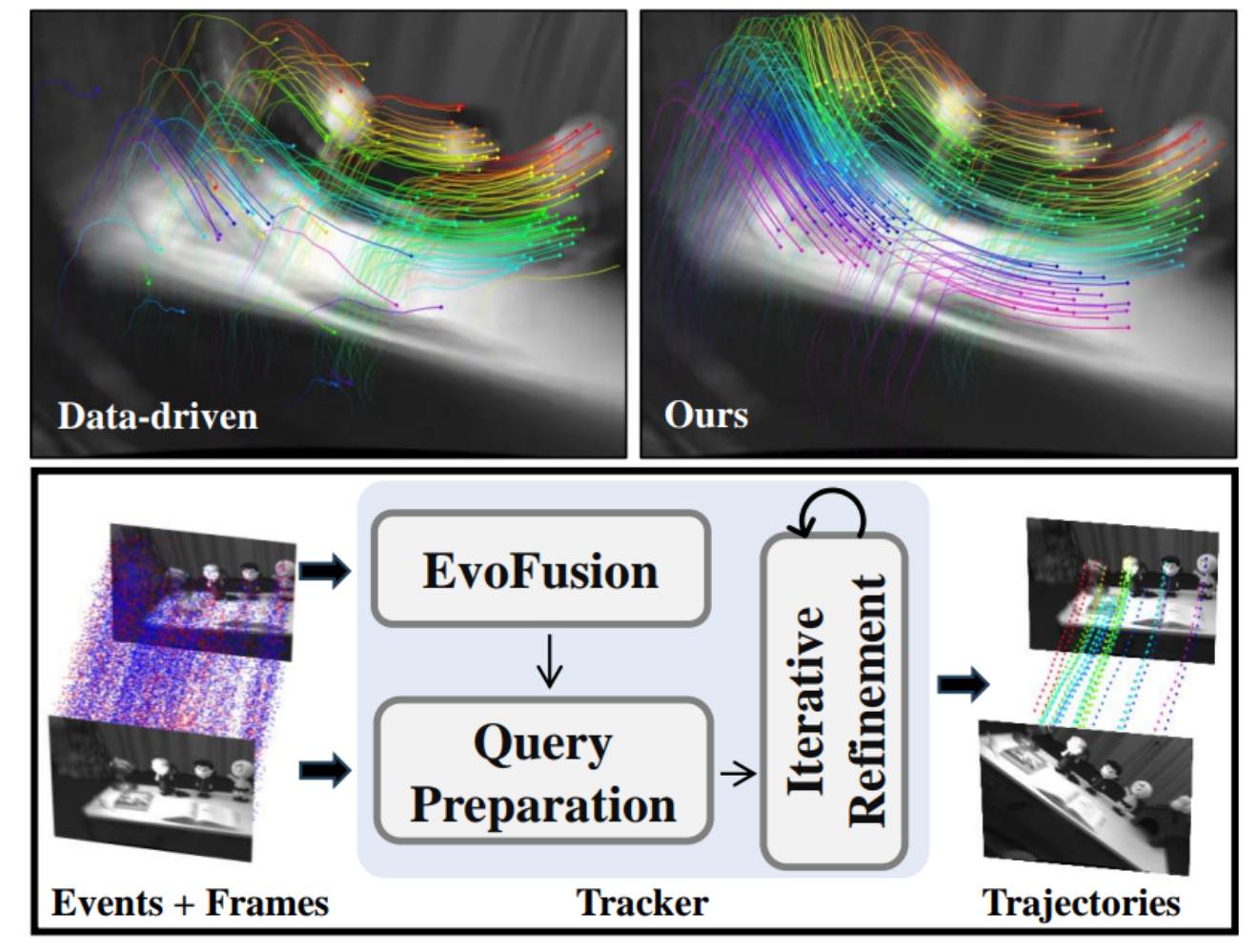
Tracking Any Point with Frame-Event Fusion Network at High Frame Rate
J. Liu, B. Wang, Zhen Tan, J. Zhang, H. Shen, Dewen Hu
- Explored multi-modal fusion of RGB frames and Event cameras for robust point tracking in high-dynamic scenarios.
- Leveraged the high temporal resolution of event data to maintain tracking stability under rapid motion, providing a reliable perception front-end for dynamic robotic tasks.
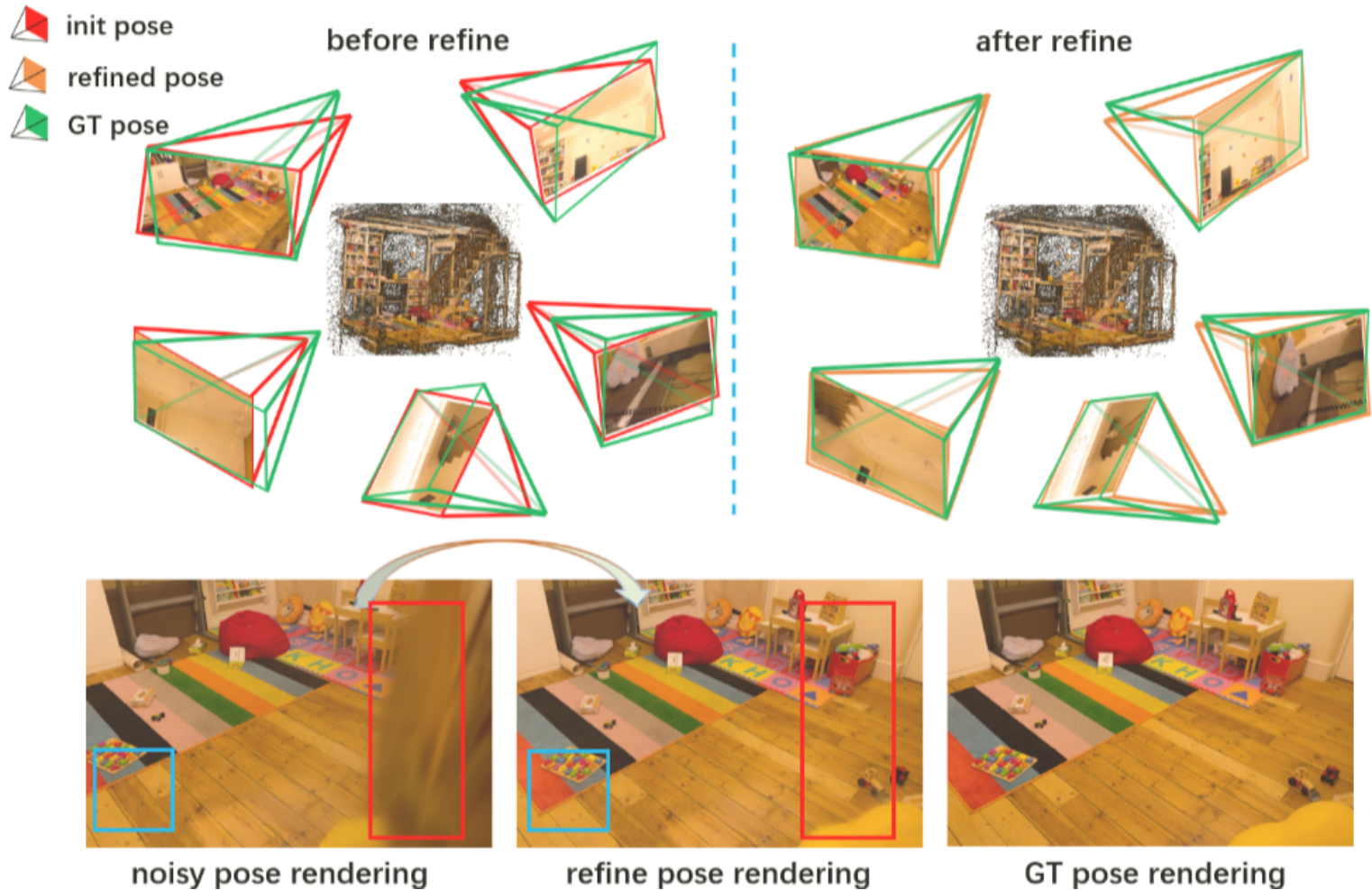
HGSLoc: 3DGS-based Heuristic Camera Pose Refinement
Z. Niu, Zhen Tan, J. Zhang, X. Yang, Dewen Hu
- Developed a heuristic camera pose refinement framework leveraging 3D Gaussian Splatting as a dense map prior.
- Significantly improved visual relocalization accuracy by aligning query images with rendered views, facilitating long-term autonomy in persistent environments.
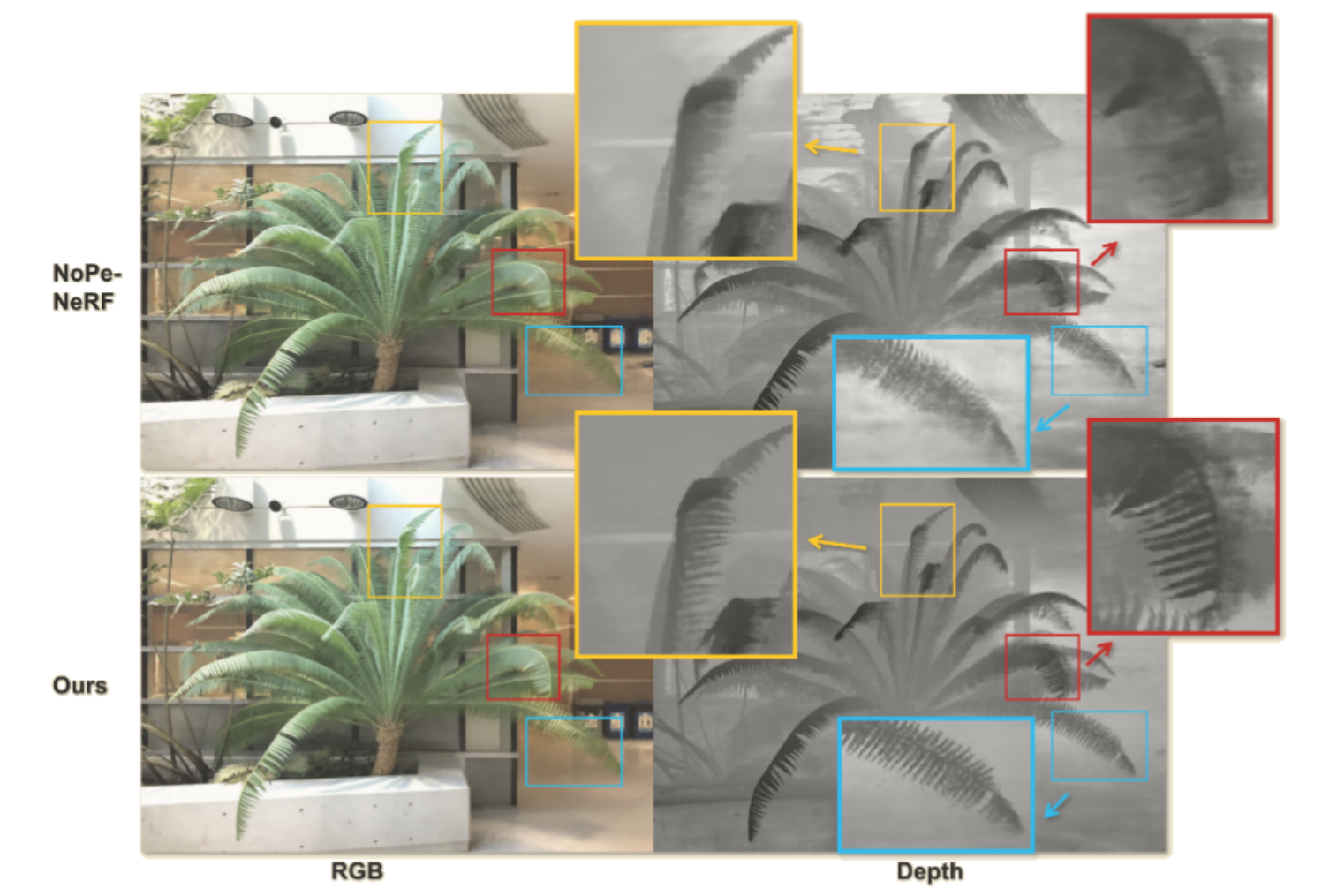
TD-NeRF: Novel Truncated Depth Prior for Joint Camera Pose and Neural Radiance Field Optimization
Zhen Tan, Z. Zhou, Y. Ge, Z. Wang, Xieyuanli Chen, Dewen Hu
- Address the dependency of NeRF on pre-computed COLMAP poses by introducing a truncated depth prior.
- Enabled joint optimization of neural radiance fields and camera poses, allowing for high-quality reconstruction without accurate initial pose priors.
🎖 Honors and Awards
- 2025, IROS 2025 EvSLAM Challenge, Champion.
- 2025, Second-class scholarship for outstanding students
- 2022, Freshman Scholarship of NUDT, First Prize.
- 2021, Munich Innovation Challenge (Tech Innovation Award), 1st Place.
- 2017, Remote Sensing Star in Wuhan University, Top 10 Students.
📖 Educations
- 2022.09 - Present, Ph.D. in Control Science and Engineering, National University of Defense Technology (NUDT).
- 2018.09 - 2022.01, M.Sc. in Geodesy and Geoinformation, Technical University of Munich (TUM) (QS Top 30).
- 2014.09 - 2018.06, B.Eng. in Photogrammetry and Remote Sensing, Wuhan University (WHU).
💬 Hobbies
- Sports: Football (University Team Captain), Skiing, Basketball, Taekwondo.
- Arts: Dancing, Movies.
- Travel: Exploring different cultures.